距离场 (Distance Fields)

1. 概述
距离场在图形里的应用,诸如抗锯齿、光线行进和纹理合成等. 有时是通过函数分析计算得出的, 但通常是从体素化meshes或
EDT(Euclidean Distance Transform)可定义为基于布尔值场 (field of booleans), 生成的标量场 (field of scalars), 使得输出中的每个值都是到输入中最近的“true”单元格的距离.
图

另一个有用的概念是有符号距离场 (SDF), 即从原始EDT中减去反转的EDT. 如图
2. 算法
在接下来的两小节中, 将描述两种基于布尔值场生成距离场的算法
- 行进抛物线 (Marching Parabolas), 一种线性时间的适用
算法 - 最小侵蚀 (Min Erosion), 一种易于实现的适用
的算法
2.1. 行进抛物线(Marching Parabolas)
本节专门介绍Felzenszwalb & Huttenlocher在2012年描述的距离场生成算法. 同遇到的替代方案相比, 该算法复杂度是
将布尔值转换为实数的问题在于, 它阻止将
因此, 诀窍是重新定义EDT, 使其成为可分离的filter. 基本上, 希望输入中的每个像素都有一个标量值的呈现系数. 用零替换所有T值, 用无穷大替换所有F值来实现这一点. 这样做的理由将在本文后面说明.
图

或者, 可移除旋转并将第二个
图
# Consume a 2D boolean field produce a 2D distance field.
def compute_edt(bool_field):
sedt = bool_field.where(0, ∞)
for row in len(sedt):
horizontal_pass(sedt[row])
transpose(sedt)
for row in len(sedt):
horizontal_pass(sedt[row])
transpose(sedt)
return sqrt(sedt)清单
该transpose函数的实现很简单, 重点关注horizontal_pass. 一个关键点是,

回想一下,我们用无穷大替换了所有F值. 从某种意义上说, 图
到目前为止, 仅描绘了y=0处的抛物线, 在第二个

虽然图
1.
2.hull中的每个抛物线都有相同的形状, 但位置唯一
3.给定lower hull中的顶点和交叉点list, 通过从左到右行进, 很容易计算Y值
可用清单
def horizontal_pass(single_row):
hull_vertices = []
hull_intersections = []
find_hull_parabolas(single_row, hull_vertices, hull_intersections)
march_parabolas(single_row, hull_vertices, hull_intersections)清单
遍历hull抛物线以填充
def march_parabolas(single_row, hull_vertices, hull_intersections):
d = single_row
v = hull_vertices
z = hull_intersections
k = 0
for q in range(len(d)):
while z[k + 1].x < q:
k = k + 1
dx = q - v[k].x
d[q] = dx * dx + v[k].y清单
接下来实现find_hull_parabolas, 通过移除完全高于其他抛物线, 实际上解决了遮挡问题.
可通过从左到右逐步构建抛物线列表, 并仔细tracking交点来实现. 每个抛物线与抛物线的交点都可用简单的代数计算出来. 此过程如清单
def find_hull_parabolas(single_row, hull_vertices, hull_intersections):
d = single_row
v = hull_vertices
z = hull_intersections
k = 0
v[0].x = 0
z[0].x = -INF
z[1].x = +INF
for i in range(1, len(d)):
q = (i, d[i])
p = v[k]
s = intersect_parabolas(p, q)
while s.x <= z[k].x:
k = k - 1
p = v[k]
s = intersect_parabolas(p, q)
k = k + 1
v[k] = q
z[k].x = s.x
z[k + 1].x = +INF
# Find intersection between parabolas at the given vertices.
def intersect_parabolas(p, q):
x = ((q.y + q.x*q.x) - (p.y + p.x*p.x)) / (2*q.x - 2*p.x)
return x, _清单
备注: 交集计算不会返回有效的Y值, 因为这不是必需的.
当新的抛物线添加到hull时,算法会检查先前添加的抛物线是否在新抛物线的“上方”, 若在上方, 则将其从hull中移除. 此过程在以下动画(仅限网络)中进行了描述, 该动画使用了与生成图
总而言之, 可通过执行一系列线性时间程序来创建一维距离场
1.将源图像中的每一行解释为不同高度的抛物线列表.
2.确定构成外壳的抛物线集.
3.沿着hull中的抛物线行进, 计算每个像素中心的Y值.
该算法的一个很好的特性是, 计算出的距离场不需要具有与源数据相同的分辨率, 因为最终值是通过从抛物线函数列表中采样计算得出的.
要查看行进抛物线算法的完整实现, 请参阅参考部分.
2.2. 最小侵蚀(Min Erosion)
行进抛物线算法可使用任何通用编程语言来实现, 但有些情况使用图形API(例如OpenGL、WebGL、Vulkan 或 Metal)更容易实现
实现此目的的一种方法涉及一系列图像处理过程, 其中每个过程都是一个全屏四边形或三角形. 其工作原理是先应用一系列horizontal passes, 然后应用一系列vertical passes, 如下所示. 一旦计算平方距离, 种子图像再次由值0和“无穷大”组成(其中无穷大由F十六进制数字表示).
顶行描绘了一系列horizontal passes,底行显示vertical passes. 黄色轮廓的像素被修改, 而所有其他像素被丢弃. 字母A和B指的是一对ping-pong缓冲区, 因为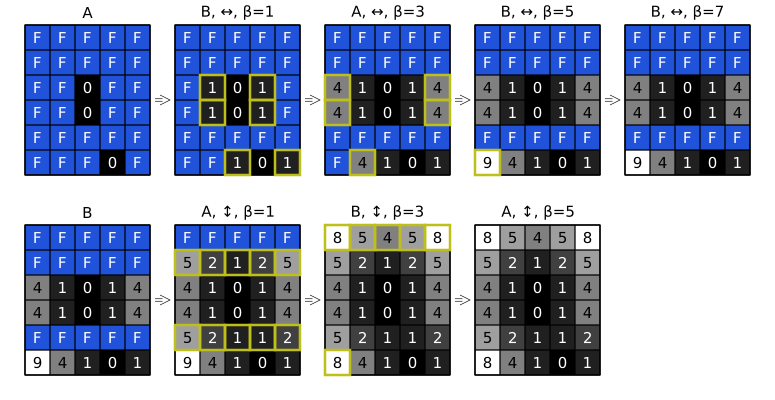
在每个pass中, 每像素都会与通过+β而变大的两个相邻值进行比较. 如果任一变大的相邻值小于当前像素的值, 则当前像素的值将被增强的值覆盖.
备注: 给定的像素可能会被修改多次!例如, 左下角的F在稳定为最终值8之前会变为9.
因此, 每个passes序列仅在不会进一步修改值时(例如, 当所有像素都被丢弃时)才会终止. 这点可使用查询例如GL_ANY_SAMPLES_PASSED来检测. 或在预定pass次数后终止, 即可计算出距离场的合理准确近似值.
上述方法的一些GLSL着色器示例代码可在此处找到. 此代码生成一个RGB图像, 该图像在b通道中具有平方距离, 在rg通道中存储最近点坐标. 最近点坐标将在文章的后面讨论.
有关更高效的
还要注意, 距离场可以通过使用特殊的混合操作组合在一起, 该操作取源颜色和目标颜色的最小值. 在OpenGL中, 这可通过将GL_MIN传进glBlendEquation来启用, 例如, 从小点云生成距离场的一种(不切实际的)方法是渲染以每个点为中心的大四边形, 其中片段着色器计算与四边形中心距离成正比的亮度.
3. 距离可视化
我们先暂时搁置距离场的生成, 而是讨论一下描绘距离场的方法.
可视化SDF的最简单方法是取每个像素的绝对值, 然后对这些值进行归一化, 使得最大距离变为白色, 最小距离变为黑色. 这在图
另一种策略是绘制轮廓线, 如上右侧图所示. 这可通过将一系列等距范围内的距离值涂黑来实现. 以下是使用numpy的示例实现
for h in range(0, 1000, 100):
this_contour = np.logical_and(sdf >= h-1, sdf <= h+1)
all_contours = np.logical_or(all_contours, this_contour)4. 圆柱面和圆环面距离
通过在两侧堆叠源图像的副本, 然后从生成的距离场中提取中间部分, 可使其可平铺. 若事先已知距离场将由圆柱面包裹(或球面, 使用纬度经度投影), 该做法可能会有用.
图

通过从源图像的3x3平铺创建EDT, 然后从结果中提取中间平铺来实现环形包裹.
5. 坐标场和Voronoi图
最近点变换 (CPT) 与EDT相关. 输入booleans场, 生成coordinates场, 其中每个坐标指向输入场中最近的T.
CPT很容易转换为EDT: 对于每个像素, 只需计算该像素与CPT指向的像素之间的距离.
CPT也很容易转换为Voronoi图: 对于每个像素, 将其替换为CPT指向的像素的颜色, 如图

为了生成CPT, march_parabolas程序可修改用以存储每个抛物线顶点的列索引. 参见清单
def march_parabolas(single_row, hull_vertices, hull_intersections, indices):
d = single_row
v = hull_vertices
z = hull_intersections
k = 0
for q in range(len(d)):
while z[k + 1].x < q:
k = k + 1
dx = q - v[k].x
d[q] = dx * dx + v[k].y
indices[q] = v[k].x清单
第一次调用horizontal_pass生成X坐标,第二次调用horizontal_pass生成Y坐标. 之后, 需要解引用X坐标以获取最终的coordinates场. 清单
def compute_cpt(bool_field):
sedt = bool_field.where(0, ∞)
xcoords = empty 2D field of scalars
ycoords = empty 2D field of scalars
for row in len(sedt):
horizontal_pass(sedt[row], xcoords)
transpose(sedt)
for row in len(sedt):
horizontal_pass(sedt[row], ycoords)
# Deference the X coordinates to produce the final CPT.
cpt = empty 2D field of coordinates
for j in height:
for i in width:
x = xcoords(i, j)
y = ycoords(i, j)
cpt(i, j) = (cpt(i, y).x, y)
return cpt清单
6. 程序化地形
距离场可用于为程序化生成的地形生成合理的高度图. 山脉往往沿着形状的“脊柱”延伸. 为了减轻假象, 可使用梯度噪声来调整生成的海拔数据.
图

图

通过使用阶跃函数量化距离场, 可以实现另一种有趣的外观. 离散值之间的边界表示轮廓线. 图

为了生成随机的政治区域, 可将上一节中的坐标场与基于噪声的扭曲结合使用; 见图

7. 参考
Inigo Quilez 在他的博客上有大量关于解析距离场的信息
- 三维距离函数(3D Distance Functions)
- 二维距离函数(2D Distance Functions)
“抛物线 (parabolas)”算法的实现有以下几个不同的来源
- Felzenszwalb page at Brown University (C++06)
- Giorgio Marcias github project (C++11)
- snowy (Python 3)
- heman (C99)
- nile (nim)
一个有意思的库是DGtal,可生成
有关在
相关链接
1.Baked SDF
2.Distance Fields